




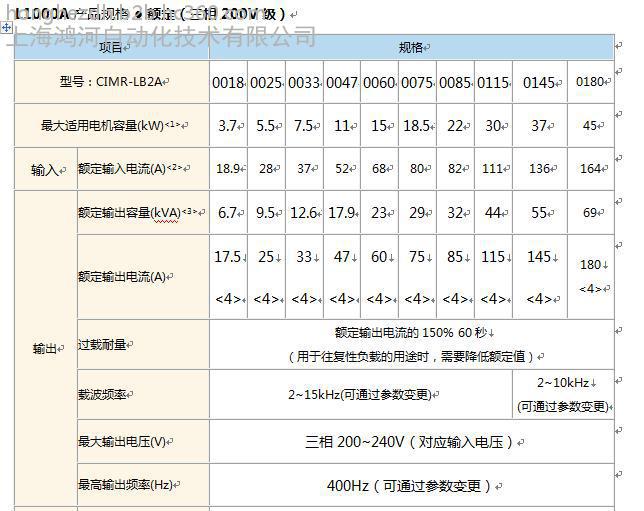
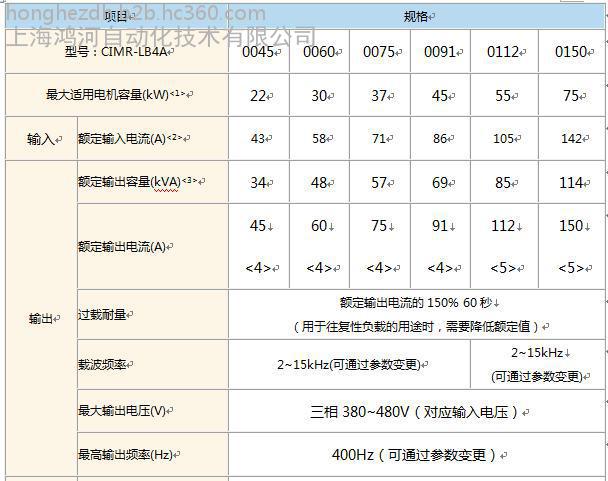
| 产品系列 | L1000A |
|---|---|
| 电源相数 | 多相 |
| 控制方式 | V/F开环 |
| 营销方式 | 代理 |
| 外型 | 塑壳 |
| 品牌 | YASKAWA/安川 |
| 加工定制 | 否 |
安川电梯专用变频器,高性能电流矢量控制和绝对值编码器的应用,实现高性能无传感器的起动转矩补偿功能,使电梯乘坐更加舒适;驱动感应电机或同步电机都能进行停止型自学习,内置电梯专用时序,可拆卸式端子盘,使得调试、维护更加简单方便;同时具有自动转矩提升功能,满足电梯各种过负载试验;多种安全功能及长寿命设计,使产品更具安全、高可靠性。欢迎使用。
一. 配线说明:
编码器PG卡型号PG-B3用于异步电机,增量型,开路集电极型,和安川G7同,12V,0V,A,B,对应接口CN5-B,C。
编码器PG卡型号PG-X3用于同步电机,和安川676GL5-IP同,编码器为线驱动型,信号为A+,A-, B+,B-,Z+,Z-,电源为5V,IP为5V,IG为0V。注意有跳线,12V和5V用跳线选择,对应接口CN5-B,C。可适配编码器海德汉1321及多摩川等。
PG卡型号PG-F3用于同步电机,海德汉公司的ENDAT2.1/01, ENDAT2.2/01,变频器上有三个插口,CN5-C,CN5-B,CN5-A,三个出口相同,如果只有一个PG卡,请插在最上面的CN5-C上。可匹配海德汉1313和413编码器。
PG-E3用于海德汉ERN1387,5V,最大电流200毫安。
M1个M2接运行信号
MA和MC接故障信号,SN是公共端,30KW以下无制动单元,37千瓦以上需要制动单元。
二. 变频器参数说明
环境设定参数:
A1-00 LCD操作器显示语言的选择 0:英语 7:汉语
A1-01 参数的访问级别 0:可设定/监视A1-01,A1-04,也可监视U参数
1:仅可设定/监视A2-01∽A2-32 2:可设定/监视所有参数
A1-02 控制方式 选择变频器的控制模式。同步电动机选择7
0 : 无PG 的V/f 控制 2 : 无PG 的矢量控制
3 : 带PG 的矢量控制 7: 带PG 的PM 矢量
A1-03 初始化 2220 2线制初始化
应用参数:
b1-01 速度指令选择 1 0 操作器 1 控制回路端子
b1-02 运行指令选择 1 0 操作器 1 控制回路端子
b1-03 停止方式选择 0 0 减速停止 1 自由滑行停止
b1-14 相序选择 0:标准 1:进行相序调换(电机的旋转方向正转反转发生切换)
调整参数:
C1-01 加速时间 数字量2.5 ; 模拟量 0
C1-02 减速时间 数字量2.5 ; 模拟量0
C2-01 加速开始时的S字 数字量 2.0 ; 模拟量0
C2-02 加速结束时的S字 数字量0.8 ; 模拟量0
C2-03 减速开始时的S字 数字量0.8 ; 模拟量0
C2-04 减速结束时的S字 数字量1.0 ; 模拟量0
C2-05 低于平层速度的S字特性时间 数字量 0.5 ; 模拟量0
C5-01 ASR比例增益1 40(PM时设置为3) 高速时的比例,大于C5-07的速度时有效
C5-02 ASR积分时间1 0.5 ( PM时设置为0.3) 高速时的积分,大于C5-07的速度时有效
C5-03 ASR比例增益2 20 (PM时设置为3) 低速时的比例,小于C5-07,加速时有效
C5-04 ASR积分时间2 0.5 低速时的积分,小于C5-07,加速时有效
C5-06 速度控制(ASR的一次延迟时间 0.004异步;0.02同步
C5-07 ASR切换速度 15
C5-08 速度控制(ASR)的积分上限 400%
C5-13 ASR比例增益3 40(PM时设置为3) 低速时的比例,小于C5-07,减速时有效
C5-14 ASR积分时间3 0.5 ( PM时设置为0.3)低速时的积分,小于C5-07,减速时有效
C5-19 零伺服时的速度控制(ASR)的比例增益(P) 5 以0.01 为单位设定磁极吸引,起动时所使用的ASR 的P 增益。
C5-20 零伺服时的速度控制(ASR)的积分时间(I) 0.5S,通常无需设定
C6-03 载波频率 3 8k 异步电机带PG的矢量控制用此载波频率最大15K
C6-09 自学习中的载波频率选择(旋转形)0 0 : 载波频率为5kHz 1 : C6-03 的设定值
指令参数:
D1-01 0
D1-02 5 检修半速 (根据现场调整)
D1-03 4 开门再平层速度 (根据现场调整)
D1-04 4 爬行速度 (根据现场调整)
D1-05 10 检修速度 (根据现场调整)
D1-06 40 单层速度 (根据现场调整)
D1-07 70 双层速度 (根据现场调整)
D1-08 100 多层速度 (根据现场调整)
异步电机控制用HZ作单位,同步电机用百分比作单位。
电机参数
E1-01 输入电压
E1-04 最高输出频率
E1-05 最大电压
E1-06 基本频率
E1-08 中间输出频率电压
E1-09 最低输出频率
E1-10 最低输出频率电压
E1-13 基本电压
电机参数,异步
E2-01 电机额定电流 异步电机,电机自学习
E2-02 电机额定滑差 异步电机,电机自学习
E2-03 电机空载电流 异步电机,电机自学习
E2-04 电机极数 异步电机,电机自学习
E2-05 电机线间电阻 异步电机,电机自学习
E2-06 电机漏电感 异步电机,电机自学习
E2-07 电机铁芯饱和系数1 异步电机,电机自学习
E2-08 电机铁芯饱和系数2 异步电机,电机自学习
E2-09 电机机械损失 异步电机,电机自学习
E2-10 转矩补偿用电机铁损 异步电机,电机自学习
E2-11 电机额定容量 异步电机,电机自学习
电机参数,同步
E5-02 电机额定容量 同步电机,电机自学习 根据电机铭牌设
E5-03 电机额定电流 同步电机,电机自学习 根据电机铭牌设
E5-04 电机极数 同步电机,电机自学习 根据电机铭牌设
E5-05 电机电枢电阻 同步电机,电机自学习
E5-06 电机的d轴电感 同步电机,电机自学习
E5-07 电机的q 轴电感 同步电机,电机自学习
E5-09 电机的感应电压系数1 同步电机,电机自学习
E5-11 PG 的原点脉冲的补正量 同步电机,电机自学习
E5-24 电机的感应电压系数2 以0.1mv/(min) <机械角度>为单位设定电机线间电压的有效值。进行该整定时,请设定为E5-24=0。
选择卡参数:
F1-01 PG参数 8192 根据编码器设
F1-05 PG运转方向 1 电机反转CCW时A相超前 0 电机正转CW时A相超前
F1-06 PG 输出分频比 1 设定PG 速度控制卡的脉冲输出的分频比。
分频比= (1 + n)/m (n = 0,1 m = 1 ~ 32)
只有在使用PG 速度控制卡 PG-B2 时有效。分频比的设定范围可为1/32 ≤ F1-06 ≤ 1。
F1-10 速度偏差过大(DEV) 检出值 30 设定速度偏差过大 (DEV) 的检出方
法。F1-10 的设定值( 以最高频率为100%,以% 为单位设定) 以上的速度偏差的持续时间超过了F1-11 中设定的时间后,将检出速度偏差过大。速度偏差为电机实际速度与指令速度的差。
F1-11 速度偏差过大(DEV) 检出时间 3.5
F1-18 PG的DV3(反转检出)检出选择 0:无效 n:设定DV3(反转检出)的检出次数。
出厂设定为10
F1-19 PG的DV4(防止反转检出)检出选择 0:无效 n:设定DV3(防止反转检出)的脉冲数。
出厂值是128
F1-29 DEV(速度偏差过大)检出条件的选择
0:速度指令,软起动输出,电机速度这3者一致后,检出DEV(速度偏差过大)。
1:速度指令和软起动输出一致后,检出DEV(速度偏差过大)。
2:运行中始终检出DEV(速度偏差过大)。
出厂值是2
控制回路端子功能:
H1-03 端子S3的功能选择 3 多段速1
H1-04 端子S4的功能选择 4 多段速2
H1-05 端子S5的功能选择 5 多段速3
H1-06 端子S6的功能选择
H1-07 端子S7的功能选择
H1-08 端子S8的功能选择
H2-01 端子M1和M2的功能选择 50 制动器打开指令
H3-01 端子AI 信号电平选择
0: 0-10V输入 1: –10V-10V输入
H3-02 端子A1的功能选择 默认为0,第一段速模拟量速度指令
H3-03 端子A1的输入增益 出厂为100,单位为%
H3-04 端子A1的输入偏置 以%为单位设定输入0V时分配给端子A1的功能的偏置量。
H3-09 端子A2 信号电平选择
0: 0-10V输入 1: –10V-10V输入
H3-10 端子A2的功能选择 默认为1F,无效
H3-11 端子A2的输入增益 出厂为100,单位为%
H3-12 端子A2的输入偏置 以%为单位设定输入0V时分配给端子A2的功能的偏置量。
H3-13 模拟量输入的滤波时间参数 0.03
0 第1段速模拟量速度指令(重复设定时叠算) 10V=E1-04(最高输出频率)
2 第2段速模拟量速度指令 10V=E1-04(最高输出频率)
3 第3段速模拟量速度指令 10V=E1-04(最高输出频率)
14 转矩补偿电机的额定转矩 10V=电机额定转矩
1F 直通模式 作为直通模式使用时,请进行该设定
保护功能:
L1:电机保护功能
L1-01 电机保护功能选择 出厂值是5
0:无效
1:通用电机的保护
2:变频器专用电机的保护
3:矢量专用电机的保护
5:PM电机(恒定转矩用)的保护
当1台变频器连接多台电机时,请设定为0(无效),并在个电机上设置热继电器。
L1-02 电机保护动作时间 设定OL1(电机过载保护)检出时间
L2:欠电压检出
L2-05 Uv(主回路欠电压)检出值 设定Uv(主回路欠电压)的检出值(主回路直流电压)
L7:转矩极限
L7-01 正转侧电动状态转矩极限 出厂200,最大300
L7-02 反转侧电动状态转矩极限 出厂200,最大300
L7-03 正转侧再生状态转矩极限 出厂200,最大300
L7-04 反转侧再生状态转矩极限 出厂200,最大300
N:特殊调整
N8-35:初次励磁检测方式选择 2
1:高频重叠方式 2:脉冲方式
出厂是1,但是在上电初次启动时,输出开闸时间很长,大概在10秒以上,主板会报40故障,改为2
O:操作器相关参数
O1-01 驱动模式显示项目选择 106
电源接通后,操作器依次显示速度指令→旋转状态→运行速度→输出电流→输出电压→U1-□□。
O1-01 用来选择显示项目而非输出电压
O1-02 用来选择电源接通时显示的内容。(“U1-□□”时则设定“1□□”。根据控制模式的不同,可设定的项目有所不同)
O1-02 电源接通时监视显示
1:速度指令(U1-01)
2:FWD/REV(正转中/反转中)
3:运行指令(U1-01)
4:输出电流(U1-03)
5:O1-01 设定的监视项目
O3-01 拷贝动作选择
0:拷贝指令等待
1:将变频器的参数读入操作器
2:将操作器中保存的参数写入变频器
3:将变频器的参数和操作器保存的参数比对
O3-02 读取动作许可
0:无效(不许将参数读入操作器)
1:有效(允许将参数读入操作器)
电机参数学习:
异步电机的自学习
T1-01自学习模式选择设定自学习模式。
0 : 旋转形自学习
1 : 停止形自学习1
2 : 仅用于线间电阻的停止形自学习
4:: 磁极自学习2
T1-02 电机输出功率以kW 为单位设定电机的额定输出功率。0.00 ~650.00
Mtr Rated Power
T1-03 电机额定电压,根据电机的铭牌值,以V 为单位设定电机的基本电压。
Rated Voltage
T1-04电机额定电流,根据电机的铭牌值,以A 为单位设定电机的基本电流。
Rated Current
T1-05电机的基本频率,根据电机的铭牌值,以Hz 为单位设定电机的基本频率。0 ~120.0 60.0Hz
Rated Frequency
T1-06电机的极数根据电机的铭牌值,设定电机的极数。2 ~ 48 4
Number of Poles
T1-07电机的基本转速根据电机的铭牌值,以min-1 为单位设定电机的基本转速 0 ~24000 1450min-1
Rated Speed
T1-08自学习时的PG 脉冲数,设定使用的PG( 脉冲发生器,编码器) 脉冲数。设定电机每转一周的脉冲数不倍增的值。0 ~24000 600PPR
PG Pulses/Rev
T1-09电机空载电流 (T1-01=1,4)
No load current
T1-10 电机额定滑差(T1-01=4)
???PM 电机的自学习:T2
T2-01 PM电机自学习模式选择
0:PM电机参数设定
1:PM的停止形自学习
2:PM电枢电阻(停止形)自学习
3:初次磁极检测参数自学习
4:电梯原点停止形自学习
10:电梯原点旋转形自学习
11:旋转形感应电压参数自学习
T2-04电机额定容量以kW 为单位设定电机的额定输出功率。自学习后,测定值自动设定在E5-02上。
T2-05电机额定电压 根据电机铭牌设定电机的基本电压。自学习后,测定值自动设定在E1-13上。
T2-06电机额定电流 ,根据电机铭牌设定电机的额定电流。自学习后,测定值自动设定在E5-03上。
T2-08电机极数 根据电机铭牌设定 ,自学习后,测定值自动设定在E5-04上。
T2-09电机的基本转速
T2-16自学习时的PG 脉冲数设定PG (脉冲发生器,编码器)的脉冲数。自学习后,测定值自动设定在F1-01
上。以电机每转一圈的脉冲数设定非倍增的值。0 ~ 8192 8192PPR
现场没有条件做动态整定的,只要做1和4的静态自学习就可以了。
监控参数:
U1-01 速度指令
U1-02 输出频率
U1-03 输出电流
U1-05 电机速度
U1-09 输出力矩
U1-10 输入端子状态
U1-11 输出端子状态
U1-13 端子A1的输入电压
U1-14 端子A2的输入电压
U6-13 磁极位置检出值(传感器) -180度到180度。
三. 预负载的调整
H3-09 端子A2的信号电瓶选择0:0 ∽10V 1:-10∽10V
H3-10 端子A2的功能选择,14,转矩补偿
H3-11 模拟量输入A2端子增益 ,出厂100%
H3-12的偏置调整是无效的
S3-27 设定轿厢在载荷为0%的状态下打开制动器时使轿厢静止所需的转矩补偿值。出厂设定为-50%,范围在-100到100,力矩小的话可以再降低。
S3-28 设定在尽量加大轿厢载荷为(50%以上)后打开制动器时使轿厢静止所需的转矩补偿值。出厂设定为50%,范围在-100到100,力矩小的话可以加大该值。
S3-29 在轿厢载荷为0%的状态下,以来自载荷传感器的模拟量输入电压为100%,以%为单位进行设定。一般0%不用修改
S3-30 在轿厢载荷为S3-28的状态下,以来自载荷传感器的模拟量输入电压为100%,以%为单位进行设定。一般100%不用修改.
四.方向的调整
如果在作完电机自学习后,上和下是反的,不用交换电机的输出动力线,修改b1-14的值,取反;再修改F1-05的值,也是取反,然后重新做角度自学习,T2-01=4,学习完成后即可。
五.变频器故障代码
UV1 主回路低电压 未输入运行指令(变频器停止中),主回路直流电压低于L2-05的设定值,
200V级约190VAC,400V级约为350VAC
UV2 控制电源故障,控制电源的电压降低。
UV 主回路欠电压
GF 接地故障(该故障通常是变频输出接触器非零电流释放而引起)
OC 过电流(该故障通常是由于编码器出现问题而引起)
OU 过电压 主回路直流电压超过检出电平
OS 过速度 电机速度超出检出电平
DEv 速度偏差过大
PGO PG断线
PF 变频器输入电压欠相
LF 变频器输出缺相
PF 主回路电压故障,主回路直流电压在再生时以外发生异常波动,(在设定为L8-05=1时有效)
OH 散热片过热,晶体管冷却散热片温度超过允许值L8-02,L8-02的出厂设定根据O2-04(变频器容量选择)的设定而异。
OH1 变频器过热OH1,晶体管冷却散热片温度超过允许值100到110度,
OL1 电机过负载
OL2 变频器过负载
OL3 过力矩检出1 力矩超过了检测电平L6-02
OL4 过力矩检出2 力矩超过了检测电平L6-05
EF3-8 控制回路端子3-8外部故障
DV1 缺Z相脉冲
DV2 Z相异常
DV3 反转检出,转矩指令为正(负)方向时,连续检出加速度为负(正)方向,且连续检出速度指令与电机速度的差超过30%的状态的次数为F1-18(DV3检出选择)中设定的检出次数。
DV4 防止反转检出,电机朝着与速度指令相反的方向转了F1-19(DV4检出选择)设定的检出脉冲。
DV6 过加速度检出值,电梯轿厢的加速度超过了过加速度检出值S3-10。
CPF06 EEPROM存储数据不良,EEPROM中存储的数据有故障。
CPF24 变频器装置信号异常,输入了本变频器中不存在的装置信号(起动电源时检查)。


联系电话:13611786848
网址:www.honghezdh.com
